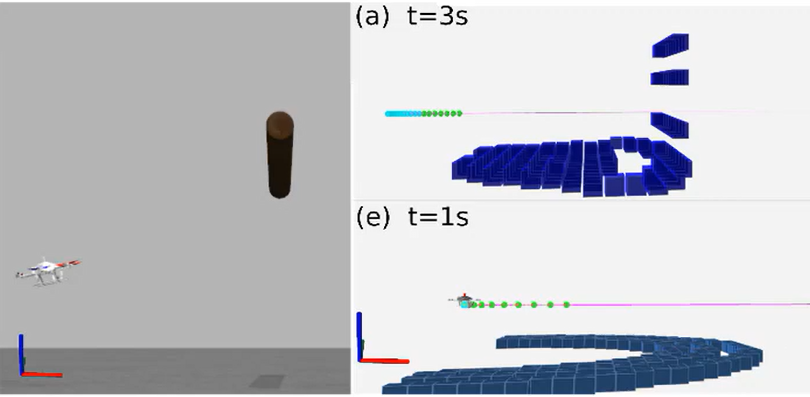
Το International Conference on Control, Artificial Intelligence, Robotics and Optimization (ICCAIRO) 2023 πραγματοποιήθηκε στην Ιεράπετρα της Κρήτης στις 11-13 Απριλίου 2023. Το διεθνές συνέδριο ICCAIRO περιλαμβάνει εργασίες που αφορούν την εφαρμογή συστημάτων τεχνητής νοημοσύνης και αλγορίθμων βελτιστοποίησης σε ρομποτικές εφαρμογές. Η εργασία που δημοσιεύτηκε, “Real-Time Local Map Generation and Collision-Free Trajectory Planning for Autonomous Vehicles in Dynamic Environments”, και διεξήχθη στα πλαίσια του έργου AUTOPSY, αφορά την ανάπτυξη μιας μεθόδου αυτόνομης πλοήγησης σε δυναμικά περιβάλλοντα, στα οποία η χρήση συστημάτων GPS είναι περιορισμένη. Πιο αναλυτικά, η προτεινόμενη μέθοδος με τη χρήση ενός αισθητήρα εγγύτητας και της οδομετρίας του οχήματος δημιουργεί έναν χάρτη του περιβάλλοντος του ρομπότ, ο οποίος ανανεώνεται σε πραγματικό χρόνο, δίνοντας τη δυνατότητα διαχείρισης κινούμενων εμποδίων. Στη συνέχεια, υπολογίζει την απόσταση του οχήματος από τα εμπόδια και με τη χρήση μιας μεθόδου βελτιστοποίησης, δημιουργείται μια διαδρομή στην οποία το ρομπότ μπορεί να αποφεύγει εμπόδια, έχοντας την ελάχιστη δυνατή απόκλιση από την προκαθορισμένη τροχιά του. Η παρουσίαση της εργασίας είναι διαθέσιμη στο: https://youtu.be/R0M_pJL-uV8?si=XTP3sZ4nnoBrRm93 .
Δημοσίευση στο συνέδριο ICCAIRO 2023 με τίτλο: Real-Time Local Map Generation and Collision-Free Trajectory Planning for Autonomous Vehicles in Dynamic Environments