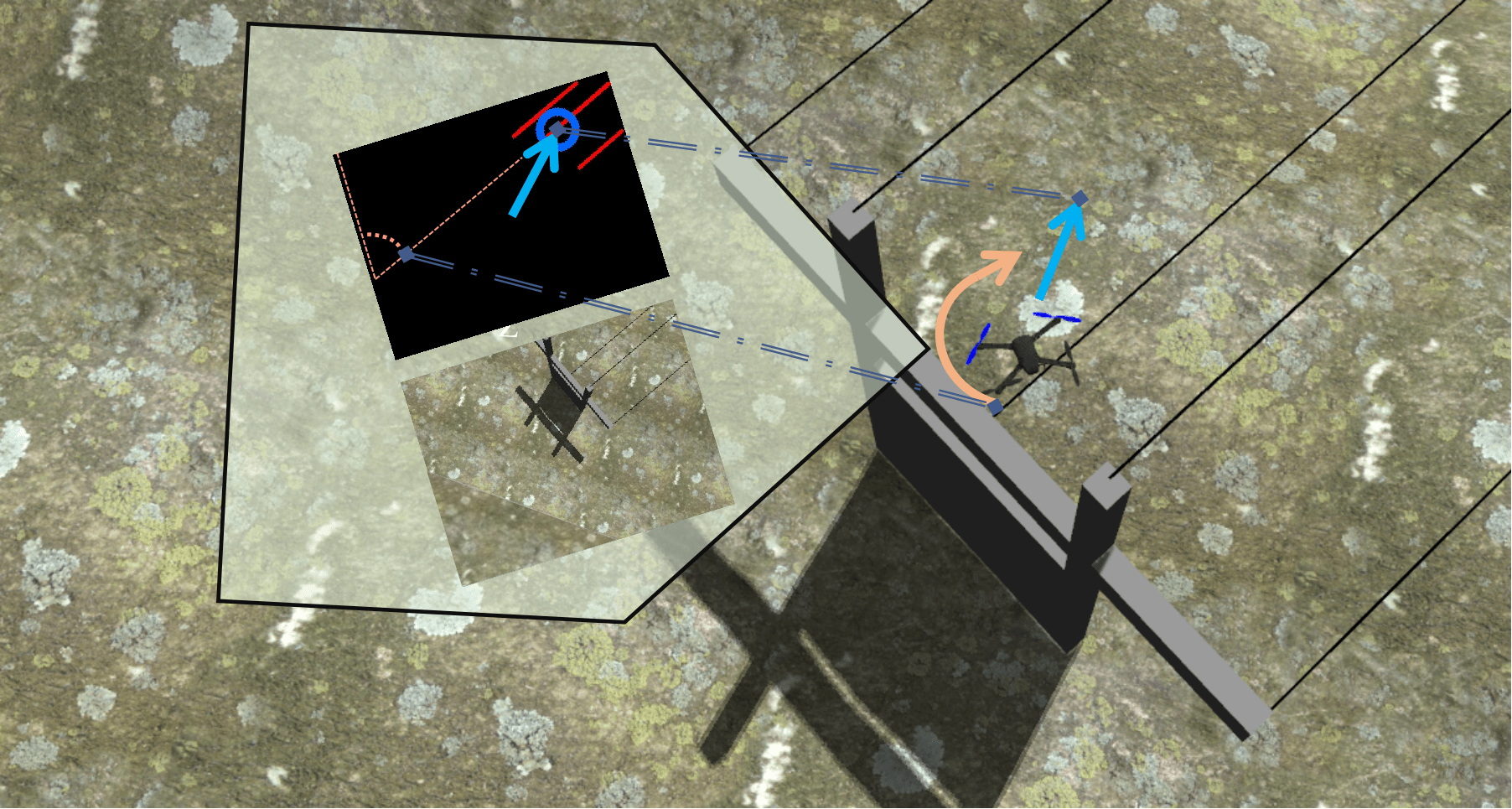
The International Conference on Unmanned Aircraft Systems (ICUAS) 2023 was held in Warsaw, Poland on 06-09 June 2023, but there was also the possibility of an online presentation. The ICUAS international conference includes papers related to the theory and application of unmanned aircraft in a variety of applications. The presented work, ” Visual Navigation based on Deep Semantic Cues for Real-Time Autonomous Power Line Inspection”, conducted within the AUTOPSY project, is about semantic autonomous navigation of UAVs using machine learning methods in the scenario of power line inspection usage. Specifically, semantic image segmentation algorithms are used and then visual and geometric features are extracted to generate the necessary velocity commands for 3D position and rotation control of the UAV. The reliability of the method is evaluated on real datasets and we demonstrate the accuracy in computing velocity commands using visual information. The paper is available at: https://ieeexplore.ieee.org/abstract/document/10155998.
Publication at the ICUAS2023 conference entitled: Visual Navigation based on Deep Semantic Cues for Real-Time Autonomous Power Line Inspection