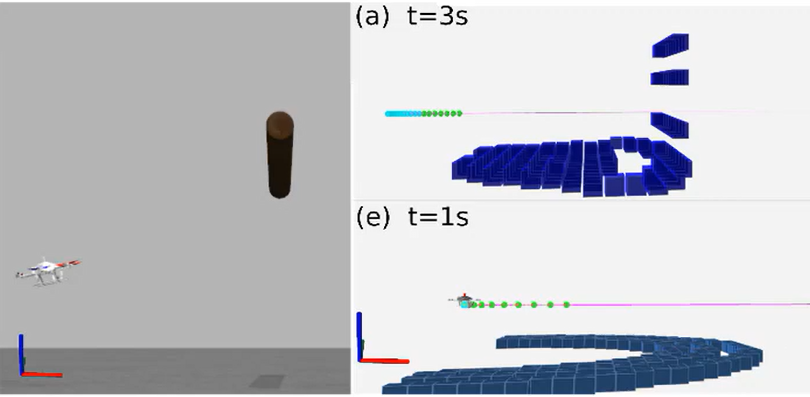
The International Conference on Control, Artificial Intelligence, Robotics and Optimization (ICCAIRO) 2023 was held in Ierapetra, Crete, on 11-13 April 2023. The ICCAIRO international conference includes papers on the application of artificial intelligence systems and optimization algorithms in robotic applications. The published paper, “Real-Time Local Map Generation and Collision-Free Trajectory Planning for Autonomous Vehicles in Dynamic Environments”, conducted within the AUTOPSY project, concerns the development of a method for autonomous navigation in dynamic environments where the use of GPS systems is limited. More specifically, the proposed method, using a proximity sensor and the vehicle’s odometry, generates a map of the robot’s environment, which is updated in real time, enabling the management of moving obstacles. It then calculates the distance of the vehicle from the obstacles and using an optimization method, a path is generated in which the robot can avoid obstacles, having the minimum possible deviation from its predefined trajectory. The presentation of the paper is available on: https://youtu.be/R0M_pJL-uV8?si=XTP3sZ4nnoBrRm93 .
Publication at the ICCAIRO 2023 conference entitled: Real-time local map generation and collision-free trajectory planning for autonomous vehicles in dynamic environments